27 Lane Changing
The lane-changing logic is composed of mandatory, discretionary, and anticipatory. The basic elements of a vehicle lane change are illustrated in the following schematic.
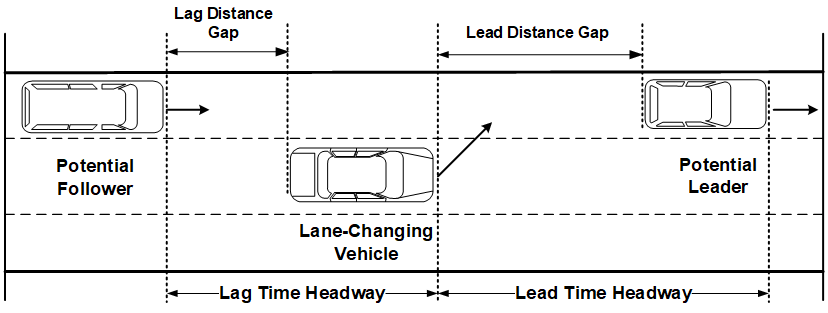
Figure 27.1: Lane Changing Illustration
27.1 Mandatory Lane Changing
A mandatory lane change is the highest priority and must be checked first. If it does not apply, then other lane change options can be checked. A mandatory lane change is typically needed for one of the following conditions:
- The vehicle is traveling on an acceleration auxiliary lane and must change lanes in order to merge with the mainline freeway traffic.
- The vehicle is not on the proper lane for the desired movement on the downstream link.
- The vehicle is on a lane which will be dropped downstream.
- The vehicle is assigned to a special purpose lane (e.g., HOV) that it is not currently in.
- The vehicle is on a lane which is blocked downstream.
An overview of the mandatory lane-changing logic employed in SwashSim is as follows.
- Identify desired lane (nearest lane that accommodates assigned movement (left, through, right)
- Identify leader and follower vehicle on desired lane
- Closest vehicle in front, closest vehicle behind
- Determine if gap is sufficient between two vehicles for subject vehicle to merge into
- Two gaps to consider, one between subject vehicle and leader vehicle, and one between subject vehicle and follower vehicle
- Make sure vehicles will not collide
Calculate the subject vehicle acceptable risk (measured as a rate of acceleration), as follows:
\[ AcceptableRisk=\left\{\begin{array}{l} MinAcceptableRisk&\mbox{If urgency factor < 0.2 (default)}\\ MaxAcceptableRisk&\mbox{If urgency factor > 1.0 (default)}\\ MinAcceptableRisk+\frac{MaxAcceptableRisk-MinAcceptableRisk\times (UrgencyFactor-UrgencyThreshold)} {1-UrgencyThreshold}&\mbox{otherwise}\\ \end{array}\right. \]
where:
\(AcceptableRisk=\) rate of acceleration tolerated by subject vehicle in making lane change into gap between two vehicles, ft/s/s,
\(MinAcceptableRisk=\) deceleration rate assumed for most conservative driver (type 1), default is \(-8\) ft/s/s,
\(MaxAcceptableRisk=\) deceleration rate assumed for most aggressive driver (type 10), default is \(-15\) ft/s/s,
\(UrgencyThreshold = 0.2\) (default),
\(UrgencyFactor=\frac{DriverAggressivenessFactor\times MinNumOfLaneChangesToReachDestinationLane\times LinkFreeFlowSpeed^2}{(20 \times DistanceAvailableToCompleteLaneChange)}\),
\(DriverAggressivenessFactor=\frac{1+(DriverType - 5.5)}{DriverTypeFactor}\) (Ranges from 0.82 (driver type 1) to 1.18 (driver type 10)),
\(DriverTypeFactor=25\) (default),
\(MinNumOfLaneChangesToReachDestinationLane=\) Number of lane changes to reach desired lane,
\(LinkFreeFlowSpeed=\) Free-flow speed specified for the link, in ft/s, and
\(DistanceAvailableToCompleteLaneChange=\) Distance to last point where vehicle must exit lane (e.g., end of lane drop), in ft.
If needed deceleration (as calculated from car-following model) is less than acceptable risk, then allow vehicle to change lanes. The acceptable risk is also checked for the vehicle that would become the follower vehicle of the lane changing vehicle.
27.2 Discretionary Lane Changing
Discretionary lane changing refers to vehicles that change lanes in order to obtain a more favorable position (i.e., to attain a higher speed in order to reach the desired speed). For example, when a vehicle changes lanes to pass a slower-moving vehicle.
Check if subject vehicle is a candidate to consider a discretionary lane change
- Does vehicle have a leader?
- Is it traveling faster than 10 mi/h? Vehicles moving slowly (e.g., in a queue) do not consider discretionary lane changes.
- Get subject vehicle target speed (minimum of desired speed and maximum speed). Maximum speed might control for large truck on a steep grade.
Calculate motivation to change lanes
\[ Motivation=\left\{\begin{array}{l} 0&\mbox{if subject vehicle actual speed ≥ target speed}\\ 1&\mbox{if subject vehicle actual speed ≤ intolerable speed}\\ 1-\frac{CurrentSpeed-IntolerableSpeed}{TargetSpeed-IntolerableSpeed}&\mbox{otherwise}\\ \end{array}\right. \]
\(IntolerableSpeed=TargetSpeed\times IntolerableSpeedMultiplier\times DriverAggressivenessFactor\)
where:
\(IntolerableSpeedMultiplier=0.8\) (default),
\(DriverAggressivenessFactor=\frac{1+(DriverType-5.5)}{DriverTypeFactor}\), and
\(DriverTypeFactor=25\) (default).
If motivation > 0 and < 1, compare motivation to random number
- Generate uniform random number (0-1)
- If motivation > random number, motivation = 1
- Otherwise, motivation = 0
If motivation = 1, determine desired lane to move into
Check if lane to the right and/or left exists, and whether it supports subject vehicle’s desired downstream movement (left, through, right). For candidate lanes, calculate impedance score:
\[LookAheadDist=\left[0.2+1.8\times\frac{NumDriverTypes-SubjectVehDriverType}{NumDriverTypes-1}\right]\times BaseLookAheadDist\]
\(BaseLookAheadDist=750\) ft (default)
For 10 driver types, LookAheadDist will range, linearly, from 1500 ft for driver type 1 to 150 ft for driver type 10. More aggressive drivers tend to be more aggressive with lane changes and do not look as far downstream in evaluating whether they will really gain an advantage by changing lanes.
For each candidate lane, calculate an impedance score.
\[LaneImpedenceScore=NumVehsDownstream+\frac{TargetSpeed-LeadVehSpeedOnCandidateLane+2}{5}\]
where:
\(LaneImpedenceScore=\) score corresponding to desirability of candidate lanes, lower/higher score is more/less desirable,
\(NumVehsDownstream=\) the number of vehicles downstream of the subject vehicle, in the candidate lane, within the look ahead distance,
\(TargetSpeed=\) minimum of desired speed and maximum speed of the subject vehicle, ft/s, and
\(LeadVehSpeedOnCandidateLane=\) speed of vehicle that would be become leader of subject vehicle on candidate lane, ft/s.
Subject to minimum value of 0.
Compare impedance of each candidate lane (plus buffer value, default = 3) to impedance of current lane (buffer value not applied). Desired lane is one with lowest impedance value.
If a different lane is desired, check for acceptable gap for merging between potential leader and follower vehicles on adjacent lane. The process is the same as for a mandatory lane change. One difference is that the minimum acceptable risk for driver type 1 is reduced from \(-8\) ft/s\(^2\) to \(-5\) ft/s\(^2\); which results in lower acceleration rates tolerated for a discretionary lane change.
The discretionary lane-changing logic also includes an option (setting in the vehicle entry settings dialog) to bias (but not restrict) slower moving vehicles to the right-side lanes. For example, if this option is selected, for a 3-lane roadway, the slowest vehicles in the traffic stream will generally be in the far-right lane, the fastest vehicles will be in the far-left lane, and “average” speed vehicles will be in the middle lane. However, unlike a lane restriction scenario, any of these vehicles can still use other lanes, which might happen temporarily for conducting passing maneuvers. This logic particularly comes into play for the truck vehicle types on grades. The trucks generally have somewhat lower desired speeds than the passenger cars, so they are more likely to be in the right- or middle-lane (of a 3-lane roadway) than in the left lane, but regardless of which lane they are initially in, as they begin to lose speed on a grade, they will look to move to the right-side lanes. For a smaller truck type (e.g., the single-unit truck) on a moderate grade, it still may be able to attain its desired speed and therefore will not be biased toward the right-side lanes.
27.4 Vehicle Lane Change Modes
There are multiple lane change modes that a vehicle may be in, as follows:
- Cooperation Oncoming Vehicle Minimum
- Cooperation Oncoming Vehicle Medium
- Cooperation Oncoming Vehicle Maximum
- Merge Accel Min
- Merge Accel Med
- Merge Accel Max
- Merge Decel Min
- Merge Decel Med
- Merge Decel Max
- Merge Cooperation Accel Min
- Merge Cooperation Accel Max
- Merge Cooperation Decel Min
- Merge Cooperation Decel Max
- Merge Cooperation Passing Oncoming Decel Min
- Merge Cooperation Passing Oncoming Decel Max
- Return To Safe Car Following
Definitions forthcoming.